FEETECH SCS15 Multi-purpose UART Bus Robot Servo for Arduino DIY (ER-AMS15998S)
The SCServo is a multipurpose UART BUS robot servo designed for use with Arduino. The unit can work in both servo mode and wheel mode. The servo mode can be wired together in robots to control limbs and set them at specific angles. The wheel mode is intended for wheel-type operations. The SCServo can give feedback on the values of position, temperature, load, speed and input voltage, as well as having the ability to set parameters such as speed of rotation, max. output torque, operating voltage limit, operating temperature limit, etc.
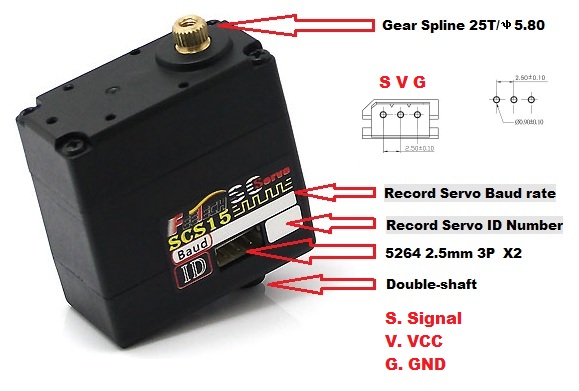
SCServo has a unique ID number to identify on BUS network: The range from 0 to 253 (0xFD) can be used (The factory default setting is ID 1), and, especially, 254(0xFE) is used as the Broadcast ID. If the Broadcast ID is used to transmit Instruction Packet, we can command to all SCServo.
After programmed servo ID, to be best way is written it on the sticker of servo. If not, maybe you will forget the ID when you programmed many servos.
SCServo have kinds of baud rate available:
The baud rate from 38400 bps to 1M bps can be used.
They are 38400, 57600,76800,115200,128000,250000,500000,1000000. (The factory default setting is 1000000 bps)
When an Arduino is being used to control the SCServo an Arduino library is required, which can be downloaded
here.
Features
- Supplied with metal gears and brackets
- A 70mm wheel with tyre is also available (37-1334)
- SC Servo is easily controlled by Arduino
- The SCServo has a unique ID number to identify on BUS network
- Operating voltage range 6 to 8.4V
- 73 rpm Max. operating speed at 8.4V
- Can feedback the value of position, temperature, load, speed and input voltage
- 15kg robot Servo
- Best choice for arduino robot
- Smart control servo
- ROHS,CE.
Specifications
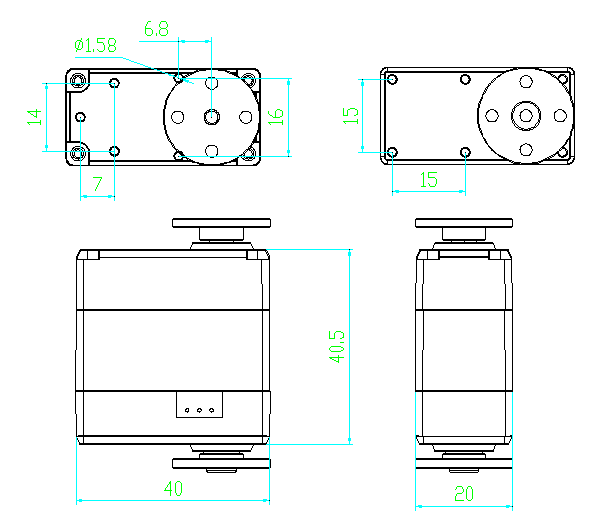
- Dimensions: 40.0X20.0X40.5mm
- Weight:56g(1.98oz)
- Gear Type(Ratio):Metal(275:1)
- Bus Interface:TTL Level Multi Drop
- Position Sensor: Potentiometer
- (Resolution): (215°/1024)
- Operating Angle: 200°(Servo Mode)
- Control System:Bus Packet Communication
- Protocol Type:Half duplex Asynchronous Serial Communication
- ID:254 ID (0~253)
- Communication Speed:38400bps ~ 1 Mbps
- Feedback:Position, Temperature, Load, Speed, Input Voltage
- Operating Voltage:6V~8.4V
- Stall Torque(Kg.cm):15(6V) 16.5(7.4V) 17(8.4V)
- Stall Current(A) :1.5A(7.4)
- Operating Speed(RPM):55(6V) 65(7.4V) 73(8.4V)
Package list
Wiki & External links


")
")
")
")
")
